Kontinuum materialne
Kontinuum materialne składa się z nieskończonej liczby punktów które nazywać będziemy punktami materialnymi. Istnieje wzajemnie jednoznaczne odwzorowanie między cząsteczkami ciała a punktami materialnymi.
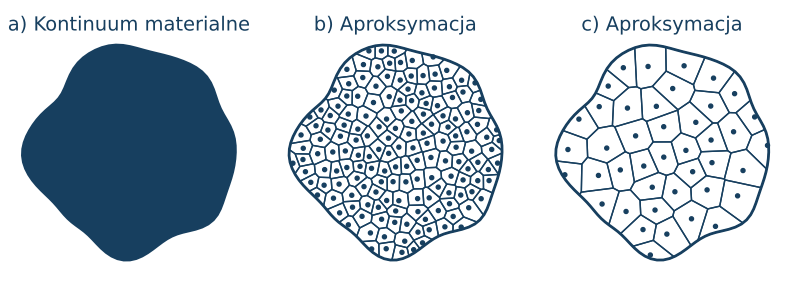
Założenie o ośrodku ciągłym - elementarne składniki ciała stałego (o budowie krystalicznej lub amorficznego) są nierozróżnialne. Przedmiotem obserwacji jest tzw. punkt materialny (tzn. punkt o niezerowej masie). Ciało (ośrodek) ciągły - continuum materialne - to takie ciało, które jest szczelnie wypełnione punktami materialnymi (ciało bez "dziur").
Klasyfikacja elementów konstrukcyjnych
• bryły - trzy wymiary są tego samego rzędu
• powłoki bryła ograniczona dwiema powierzchniami, których odległość jest dużo mniejsza od pozostałych wymiarów
• tarcze - bryła o jednym wymiarze (grubość) dużo mniejszym niż pozostałe wymiary i obciążona w płaszczyźnie środkowej. Tarcza może również powstać przez wycinek długiej konstrukcji (płaski stan odkształcenia)
• ciała osiowo-symetryczne
• pręty bryła o jednym wymiarze (długość) dużo większym niż dwa pozostałe
Zasada zesztywnienia
Jeżeli ciało odkształcalne znajduje się w równowadze pod działaniem pewnego układu sił, to również pozostanie w równowadze ciało doskonale sztywne (nieodkształcalne) identyczne z poprzednim, pod działaniem tego samego układu sił. Wniosek z tego płynie taki, że warunek konieczny i wystarczający dla równowagi ciała sztywnego jest tylko warunkiem koniecznym, ale nie wystarczającym dla ciała odkształcalnego.
Wpływ przemieszczeń konstrukcji na wartość sił biernych (reakcji podpór) i sił wewnętrznych (przekrojowych) jest pomijanie mały. Oznacza to, że przy obliczaniu tych sił nie rozróżniamy konfiguracji aktualnej od wyjściowej.
Tensory
Marian Paluch - Podstawy teorii sprężystości i plastyczności z przykładami
Postawmy pytanie -- po co mówić o tensorach? Aby na nie odpowiedzieć, należy zastanowić się jak oddzielić własności obiektu istotnie ważne geometrycznie od własności wprowadzonych przypadkowo przez wybór układu współrzędnych. I tak wektor łączący dwa ustalone punkty w przestrzeni ma w obróconych względem siebie układach współrzędnych kartezjańskich różne współrzędne, ale jego długość nie zależy od wyboru układu. Stąd widać, ze współrzędne wektora mają sens geometryczny związany z wyborem układu współrzędnych. Długość wektora związana jest ściśle z samym wektorem i ma sens geometryczny niezależny od wyboru układu współrzędnych i tym właśnie zagadnieniem zajmuje się rachunek tensorowy
Mr. Euler and Mr. Lagrange
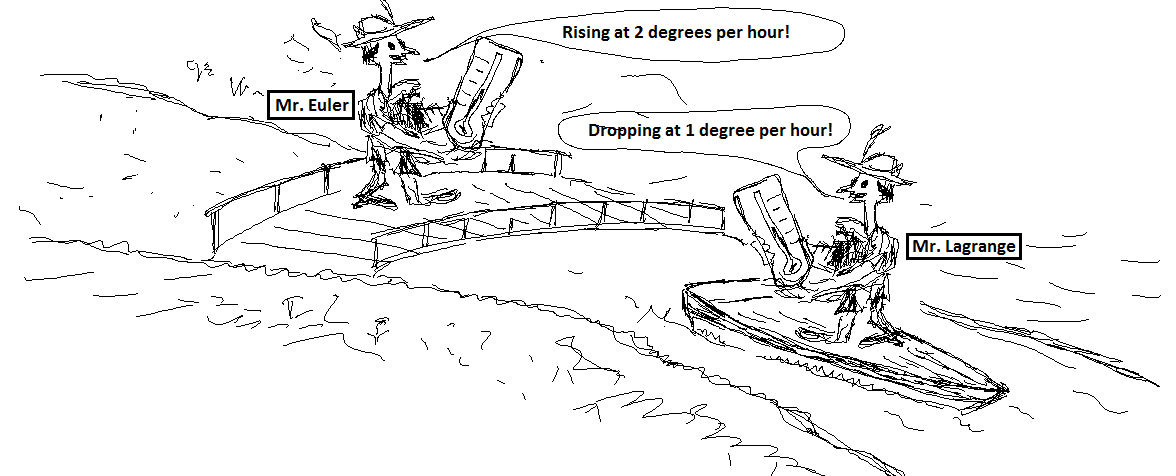
Imagine two people, Mr. Euler and Mr. Lagrange, making temperature observations in order to calculate the rate at which the temperature is varying. Mr. Euler is standing on a bridge, while Mr. Lagrange is in a boat carried by a river, as shown in the figure. When the boat passes the bridge, they discover that their observed rates differ. Why? This happens because the temperature differs in different locations on the ground. To calculate the rate, they divide the difference between the two observed temperatures by the time interval between the measurements. Even if one of the measurements was made when the boat was passing the bridge, the other measurement was when the boat was away from the bridge. Then, even if they took this other measurements at the same instant, the results can differ. In the example with the boat it was assumed that the boat was carried by the fluid, that is, it was moving with the velocity of the fluid itself. The Eulerian viewpoint consists in considering quantities as dependent on time and point in space. The Lagrangian viewpoint consists in considering quantities as dependent on time and the fluid particle. Lagrangian viewpoint is particularly useful when the laws of fluid motion are derived from the Newton laws. Once derived, however, these laws are more convenient to use from the Eulerian viewpoint.
Twierdzenie Cayleya-Hamiltona
Każdy tensor $\A^n$, $n>2$, daje sie wyrazić jako kombinacja $\A^2$, $\A$ i $\I$ ze współczynnikami zależnymi od niezmienników.
$$\A^3- I_1\A^2 -I_2\A - I_3\I = 0$$
Wektor dwoisty
Dowolny tensor antysymetryczny $\A$ możemy przestawić jako wektor dwoisty
$$w_i = -\cfrac12 \epsilon_{ijk} A_{jk}$$
Używając wektora dwoistego operację nasunięcia tensora antysymetrycznego na dowolny tensor pierwszego rzędu możemy zapisać jako
$$\A \a = \w \times \a, \quad A_{ij}a_j = w_ia_j\epsilon_{ijk}$$
Wektor ten opisuje chwilą oś obrotu.
Pochodna materialna tensora odkształcenia Greena
$$2\dot{\E} = \dot{\overline{(\C-\I)}}= \dot{\C} = \dot{\F}^T \F + \F^T\dot{\F} = (\L\F)^T\F + \F^T(\L\F) = \F^T\L^T\F + \F^T\L\F =$$ $$= \F^T(\L^T + \L)\F = \cfrac12\F^T\D\F$$Ostatecznie możemy zapisać, że
$$\dot{\E} = \F^T\D\F$$Powyższa zależność oznacza że wielkości $\dot{\E}$ i $\D$ są różnymi miarami prędkości deformacji.
Gradient - konfiguracja początkowa i aktulane
Rozważmy pręt o długości $L$. Każdemu punktowi materialnemu, który należy do pręta przyporządkowujemy pewna wartość temperatury $T$. W wyniku deformacji pręt zmienia swoją długość natomiast pole temperatury pozostaje bez zmian tzn, każdy punkt materialny ma dalej tą samą temperaturę co w konfiguracji początkowej.
Temperatura w każdym punkcie materialnym należącym do pręta nie zmieniała się podczas deformacji. Jeżeli deformacją jest duża to $\frac{dT}{dx} \neq \frac{dT}{dX}$. Obliczone gradienty na konfiguracji odniesienia nie są równe tym obliczonym na konfiguracji aktualnej (po deformacji).
Podział konstrukcji inżynierskich
Ze względu na wymiary
• konstrukcje prętowe
• konstrukcje cienkościenne
• konstrukcje masywne
Konstrukcje prętowe: belki, ramy, łuki kratownice, ruszt
Konstrukcje cienkościenne: powłoki, tarcze, płyty
Konstrukcje masywne: stopy fundamentowe, ściany oporowe
Konstrukcje: płaskie; przestrzenne
lub
• statycznie wyznaczalne
• statycznie niewyznaczalne
lub
• drewniane
• stalowe
• żelbetowe