Tensory wyższych rzędów
Dowolny tensor rzędu $N$ można przedstawić jako kombinację liniową tensorów bazowych przestrzeni tensorowej rzędu $N$:
musi on oczywiście spełniać warunki transformacji, np. dla tensora rzędu trzeciego mamy
$$A'_{ijk}= Q_{ip} Q_{jr} Q_{ks} A_{prs}$$w przypadku tensora rzędu 4 będzie to
$$A'_{ijkl}= Q_{ip} Q_{jr} Q_{ks} Q_{lt} A_{prst}$$Operacje na tensorach
• dodawanie i odejmowanie (tensory tego samego rzędu i w tej samej przestrzeni)
$$A_{ij}+B_{ij} = C_{ij}$$• iloczyn tensorowy: jeśli $\A\in\mathcal{T}_N$, $\B\in\mathcal{T}_M$, to
$$\A\otimes\B = (A_{i\ldots k}\e_i\otimes\cdots\otimes\e_k) \otimes (B_{l\ldots n}\e_l\otimes\ldots\otimes\e_n)$$ $$\A\otimes\B = A_{i\ldots k}B_{l\ldots n}\e_i\otimes\cdots\otimes\e_k\otimes\e_l\otimes\cdots\otimes\e_n.$$ $$\A\otimes\B \in \mathcal{T}_{N+M}$$• transpozycja: Jeżeli mamy tensor
$$\A = A_{i\ldots klmn\ldots p}\e_i\otimes\cdots\otimes\e_k\otimes\e_l\otimes\e_m\otimes\e_n\otimes\cdots\otimes\e_p\in\mathcal{T}_N$$to jego transpozycja po wskaźnikach $lm$ jest tensor tego samego rzędu
$$\A^T = A_{i\ldots kmln\ldots p}\e_i\otimes\cdots\otimes\e_k\otimes\e_l\otimes\e_m\otimes\e_n\otimes\cdots\otimes\e_p\in\mathcal{T}_N,$$Jeśli dla pewnej pary wskaźników tensora $\A$ zachodzi równość $\A^T = A$, to tensor ten nazywamy symetrycznym względem tych wskaźników. Jeśli $\A^T = -\A$ to tensor ten nazywamy antysymetrycznym względem tej pary wskaźników.
• zwężenie (kontrakcja), jeżeli mamy tensor
$$\A = A_{i\ldots klmn\ldots p}\e_i\otimes\cdots\otimes\e_k\otimes\e_l\otimes\e_m\otimes\e_n\otimes\cdots\otimes\e_p\in\mathcal{T}_N,$$to jego zwężeniem po wskaźnikach $lm$ jest obiekt
$$A_{i\ldots klmn\ldots p}\e_i\otimes\cdots\otimes\e_k(\e_l\cdot\e_m)\otimes\e_n\otimes\cdots\otimes\e_p = A_{i\ldots klln\ldots p}\e_i\otimes\cdots\otimes\e_k\otimes\e_n\otimes\cdots\otimes\e_p\in\mathcal{T}_{N-2}$$• nasunięcia tensorów -- iloczyny tensorowe z jednoczesną kontrakcją po wybranych wskaźnikach.
• nasunięcie proste $\A\B$ -- kontrakcja iloczynu tensorowego $\A\otimes\B$ po ostatnim wskaźniku pierwszego tensora i pierwszym wskaźniku drugiego. Przykłady: dla dwóch tensorów rzędu 2 proste nasunięcie $\A\B$ jest tensorem rzędu 2 o współrzędnych $A_{ik}B_{kj}$; dla tensora rzędu 2 i wektora nasunięcia $\A\v$ i $\v\A$ są wektorami o składowych, odpowiednio, $A_{ik}v_k$ i $v_kA_{ki}$; dla dwóch wektorów proste nasunięcie $\v\w$ jest iloczynem skalarnym $v_kw_k$.
• nasunięcie pełne $\A\cdot\B$ - iloczyn tensorowy ze zwężeniem po maksymalnej liczbie wskaźników. Np. dla dwóch tensorów tego samego rzędu pełne nasunięcie jest skalarem $A_{ij}B_{ij}$; dla tensorów rzędu 4 i 2: $A_{ijkl}B_{kl}$ lub $A_{ij}B_{ijkl}$. Jeżeli jeden z tensorów jest wektorem, to nasunięcie pełne jest jednocześnie nasunięciem prostym
• iloczyn wektorowy: jeżeli $\A\in\mathcal{T}_N$ i $\v\in\mathcal{T}_1=V^3$, to
$$$ \v\times\A = v_iA_{jk\ldots lm} (\e_i\times\e_j)\otimes\e_k\cdots\otimes\e_l\otimes\e_m = v_iA_{jk\ldots lm}\epsilon_{ijn} \e_n\otimes\e_k\cdots\otimes\e_l\otimes\e_m \in \mathcal{T}_N.$$Funkcje i pola tensorowe
• Funkcja tensorowa
Przykłady funkcje tensorowych
• funkcja skalarna argumentu tensorowego $y=f(\Z)$ (przykłady: długość, niezmienniki, itp.)
• funkcja tensorowa argumentu skalarnego $\Y = \f(z)$
• Pole tensorowe - punktowi w przestrzeni przyporządkowujemy pewien tensor. Rożnica w stosunku do funkcji tensorowej polega na ściśle określonym typie argumentu w przypadku pola tensorowego.
Różniczkowanie pól tensorowych
• Notacja przecinkowa. W celu uproszczenia zapisu wyrażeń zawierających pochodne cząstkowe stosujemy notację przecinkową
$$\phi_{,i} \equiv \pp{\phi}{x_i}, \quad v_{i,j} \equiv \pp{v_i}{x_j},\quad M_{ijkl,mn} \equiv \cfrac{\partial^2M_{ijkl}}{\partial x_m x_n}$$Konwencja sumacyjna dla zapisu przecinkowego dalej obowiązuje czyli
$$T_{ij,ik} = T_{1j,1k} + T_{2j,2k}+ T_{3j,3k} \equiv \cfrac{\partial^2T_{1j}}{\partial x_1 x_k}+\cfrac{\partial^2T_{2j}}{\partial x_2 x_k}+\cfrac{\partial^2T_{3j}}{\partial x_3 x_k}$$• operator gradientu jest wektorem:
$$\pp{(\;)}{ x_i}=(\;)_{,i}, \quad \nabla = \pp{}{ x_i}\e_i$$• gradient pola tensorowego
• dywergencja pola tensorowego
• laplasjan pola tensorowego
• rotacja pola tensorowego
Zastosujmy wprowadzone operatory różniczkowe dla pól tensorowych rzędu pierwszego i drugiego. Dla pola skalarnego $f(\x)$ możliwe jest wyznaczenie jednie gradientu i laplasjanu. Operacje dywergencji i rotacji są zdefiniowane jedynie dla pól których rząd jest większy od zera.
$$\grad f = \nabla f = \pp{f}{x_i}\e_i = f_{,i} \e_i \in \mathcal{T}_1$$ $$\Delta f = \pp{^2f}{x_i \partial x_j} = f_{,ii} \in \mathcal{T}_0$$W przypadku pola wektorowego $\v(\x)$ wszystkie operatory różniczkowe są równe
• gradient pola wektorowego
$$\grad \v = \v \otimes \nabla = (v_i\e_i) \otimes \left(\pp{}{x_j}\e_j\right) = \pp{v_i}{x_j}\e_i\otimes \e_j = v_{i,j} \e_i\otimes \e_j \in \mathcal{T}_2$$• dywergencja pola wektorowego
$$\div \v = tr (\grad \v) = \v \nabla = \pp{v_i}{x_i} =v_{i,i} \in \mathcal{T}_0$$• laplasjan pola wektorowego
$$\Delta \v = \div (\grad \v) = (\v \otimes \nabla)\nabla = \left[(v_i\e_i)\otimes \left(\pp{}{x_j}\e_j\right) \right]\left(\pp{}{x_k}\e_k\right) = \pp{^2 v_i}{x_j\partial x_k} (\e_i\otimes\e_j)\e_k = v_{i,jj} \e_i \in \mathcal{T}_1$$Uwaga: $(\e_i\otimes\e_j)\e_k = \e_i \delta_{jk}$
• rotacja pola wektorowego
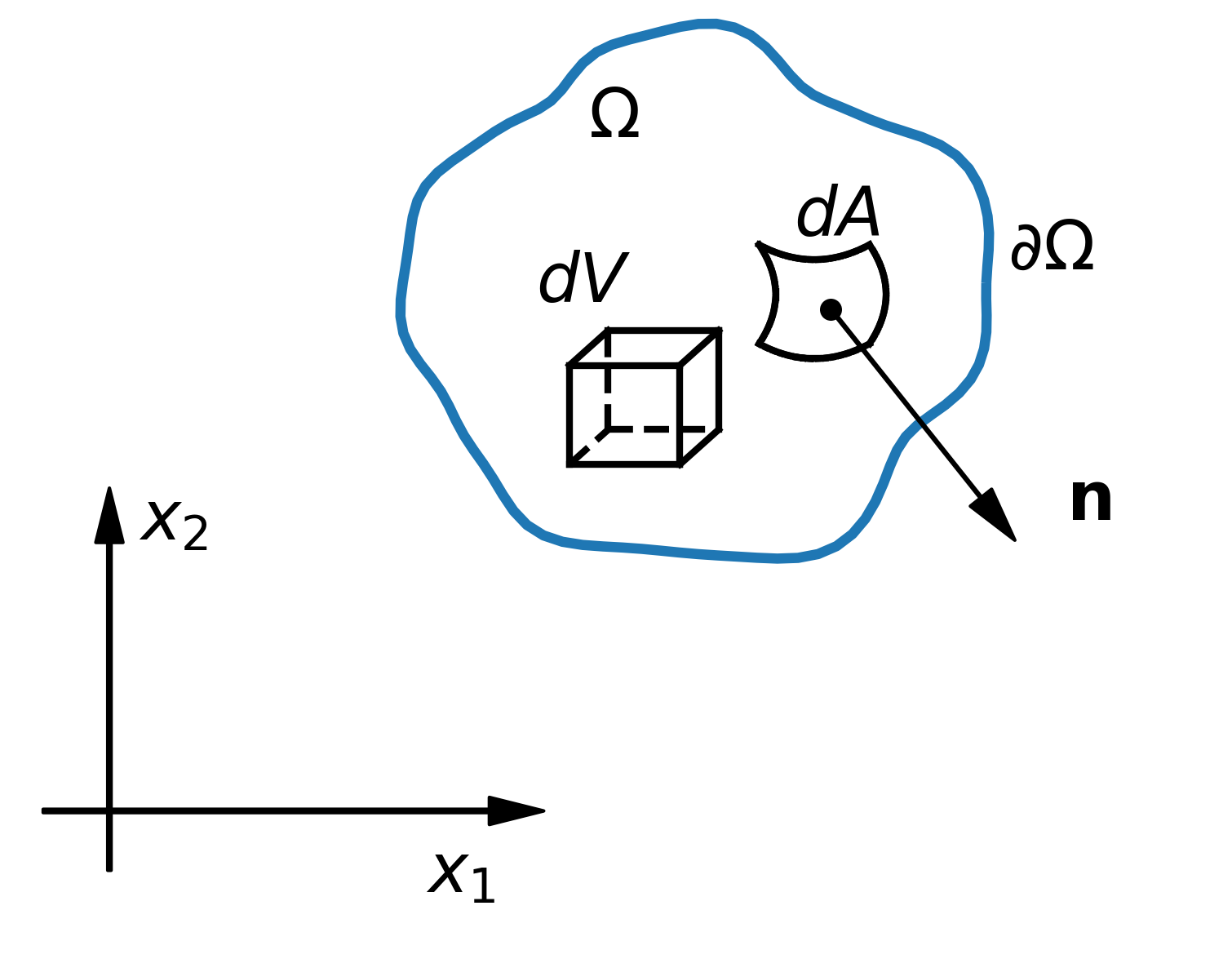
$$\rot \v = \nabla \times \v = \left(\pp{}{x_i}\e_i\right)\times(v_j e_j) = \epsilon_{ijk}\pp{v_j}{x_k}\e_k=\epsilon_{ijk} v_{j,i} \e_k \in \mathcal {T}_1$$Twierdzenie Gaussa-Ostrogradskiego i jego uogólnienia
Twierdzenie Gaussa-Ostrogradskiego umożliwa zamianę całki powierzchniowej na całkę objętościową i na odwrót.
• pola skalarne $f(\x)$
$$\int_\Omega \grad f(\x)\;dV=\int_{\dom} f(\x) \n\;dA \qquad\qquad\int_\Omega f_{,i}\;dV=\int_{\dom} fn_i\;dA$$• pola wektorowe $\v(\x)$:
$$\int_\Omega \div \v(\x)\;dV=\int_{\dom}\v(\x)\n\;dA \qquad\qquad\int_\Omega v_{i,i}\;dV=\int_{\dom} v_i n_i\; dA$$ $$\int_\Omega \grad \v(\x)\;dV=\int_{\dom}\v(\x)\otimes\n\;dA \qquad\qquad\int_\Omega v_{i,j}\;dV=\int_{\dom} v_i n_j\;dA$$ $$\int_\Omega \rot \v(\x)\;dV=\int_{\dom}\n\times\v(\x)\;dA \qquad\qquad\int_\Omega v_{j,i}\epsilon_{ijk}\;\d V=\int_{\dom} n_i v_j\epsilon_{ijk} dA$$• pola tensorowych wyższych rzędów $\A(\x)$
$$\int_\Omega \grad \A(\x)\;dV=\int_{\dom}\A(\x)\otimes\n\;dA \qquad\qquad \int_\Omega A_{ij\ldots n,p}\;dV=\int_{\dom} A_{ij\ldots n} n_p\;dA$$• ogólnie, dla dowolnego typu wyrażeń podcałkowych, obowiązuje reguła
$$\int_\Omega (\cdot)\nabla \;dV =\int_{\dom} (\cdot)\n\;dA \qquad\qquad\int_\Omega (\cdot)_{,k} \;dV =\int_{\dom} (\cdot)\,n_k\;dA$$